
NPSL & NPTL IP
Disclosing, patenting and licensing research-based inventions is an important part of academic life, for at least three reasons briefly described below.
Patents
1. Disclosing and patenting helps attribute intellectual credit to inventors. This is similar to academic publishing in some ways, but it is also quite different important ways. An academic "author" and a patent "inventor" are related, but they are not one and the same.
2. Licensing patents fulfills another important academic mission, which is to positively impact society and not merely "comfortably stay within the hallowed halls and ivory towers with new knowledge."
3. Finally, licensing provides enabling funding in at least four ways to Stanford University where, importantly, the licensing revenue is more flexible than Federal or Private Foundation funding. First, this revenue contributes to the activities of the Office of Technology Licensing (OTL) such that disclosures, patenting and licensing may continue. Second, the faculty member's / trainee's home School flexibility uses these funds to provide support to new and innovative initiatives. Third, and similar to the the second, the relevant Department(s) deploy these flexible funds where special needs and opportunities arise. Finally, providing some personal income back to inventors is financially helpful.
If interested in learning more, an important source document is the Bayh–Dole Act or Patent and Trademark Law Amendments Act (Pub. L. 96-517, December 12, 1980). It is United States legislation dealing with inventions arising from federal government-funded research. Sponsored by two senators, Birch Bayh of Indiana and Bob Dole of Kansas, the Act was adopted in 1980, is codified at 94 Stat. 3015, and in 35 U.S.C. § 200–212, and is implemented by 37 C.F.R. 401 for federal funding agreements with contractors and 37 C.F.R 404 for licensing of inventions owned by the federal government.
List of patents
13. Systems and methods for decoding intended symbols from neural activity. Pub. No.: US 2021/0064135 A1. Publication Date: Mar. 4, 2021. Krishna V. Shenoy, Jaimie M. Henderson, Frank Willett. Stanford University. PENDING. Licensed by Blackrock Neurotech and Neuralink starting in 2021.
12. Systems and methods for decoding intended speech from neuronal activity. Pub. No.: US 2019/0333505 A1. Publication Date: Oct. 31, 2019. Sergey Stavisky, Krishna V. Shenoy, Jaimie M. Henderson. Stanford University. PENDING. Licensed by Blackrock Neurotech and Neuralink starting in 2021.
11. Systems and methods for virtual keyboards for high dimensional controllers. Patent No.: US 10,949,086 B2. Publication Date: Mar. 16, 2021. Nir Even-Chen, Krishna V. Shenoy. Stanford University. ISSUED.
10. Multiplicative recurrent neural network for fast and robust intracortical brain machine interface decoders. Patent No.: US 10,223,634 B2. Date of patent: Mar. 5, 2019. David Sussillo, Jonathan C. Kao, Sergey Stavisky, Krishna V. Shenoy. Stanford University. ISSUED. Licensed by Blackrock Neurotech starting in 2021.
9. Task-outcome error signals and their use in brain-machine interfaces. Patent No.: US 10,779,764 B2. Date of patent: Sep. 22, 2020. Nir Even-Chen, Krishna V. Shenoy, Jonathan C. Kao, Sergey Stavisky. Stanford University. ISSUED.
8. Brain machine interface utilizing a discrete action state decoder in parallel with a continuous decoder for a neural prosthetic device. Patent No.: US 9,373,088 B2. Date of patent: Jun. 21, 2016. Paul Nuyujukian, Jonathan C. Kao, Krishna V. Shenoy. Stanford University. ISSUED. Licensed by Blackrock Neurotech and Neuralink starting in 2021.
7. Brain machine interfaces incorporating neural population dynamics. Patent No.: US 9,095,455 B2. Date of patent: Aug. 4, 2015. Jonathan C. Kao, Paul Nuyujukian, Mark M. Churchland, John P. Cunningham, Krishna V. Shenoy. Stanford University. ISSUED.
6. Brain machine interface. Patent No.: US 8,792,976 B2. Date of patent: Jul. 29, 2014. Vikash Gilja, Paul Nuyujukian, Cynthia A. Chestek, John P. Cunningham, Byron M. Yu, Stephen I. Ryu, Krishna V. Shenoy. Stanford University. ISSUED. Licensed by Blackrock Neurotech and Neuralink starting in 2021.
5. Brain-machine interface utilizing interventions to emphasize aspects of neural variance and decode speed and angle. Pub. No.: US 2015/0245928 A1. Publication Date: Sep. 3, 2015. Jonathan C. Kao, Chethan Pandarinath, Paul Nuyujukian, Krishna V. Shenoy. Stanford University. ISSUED.
4. Decoding of neural signals for movement control. Patent No.: US 7,058,445 B2. Date of patent: Jun. 6, 2001. Caleb T. Kemere, Gopal Santhanam, Byron M. Yu, Teresa H. Meng, Krishna V. Shenoy. Stanford University. ISSUED.
3. Cognitive state machine for prosthetic systems. International Publication No.: WO 03/005934 A3. Date of patent: Jan. 23, 2003. Richard A. Andersen, Bijan Pesaran, Partha Mitra, Daniella Meeker, Krishna V. Shenoy, Shiyan Cao, Joel W. Burdick. California Institute of Technology. ISSUED.
2. Cognitive state machine for prosthetic systems. Publication Number: US 2003/0023319 A1. Date of patent: Jul. 10, 2001. Richard A. Andersen, Bijan Pesaran, Partha Mitra, Daniella Meeker, Krishna V. Shenoy, Shiyan Cao, Joel W. Burdick. California Institute of Technology. ISSUED.
1. Processed neural signals and methods for generating and using them. Patent Number: US 6,609,017 B1. Date of patent: Aug. 19, 2003. Krishna V. Shenoy, Richard A. Andersen, Sohaib A. Kureshi. California Institute of Technology. ISSUED.
Description of patents
13. Systems and methods [for] decoding intended symbols from neural activity. Pub. No.: US 2021/0064135 A1. Pub. Date: Mar. 4, 2021. Krishna V. Shenoy, Jaimie M. Henderson, Frank Willett. Assignee: The Board of Trustees of the Leland Stanford Junior University, Stanford, CA. PENDING. Licensed by Blackrock Neurotech and Neuralink starting in 2021. pdf url
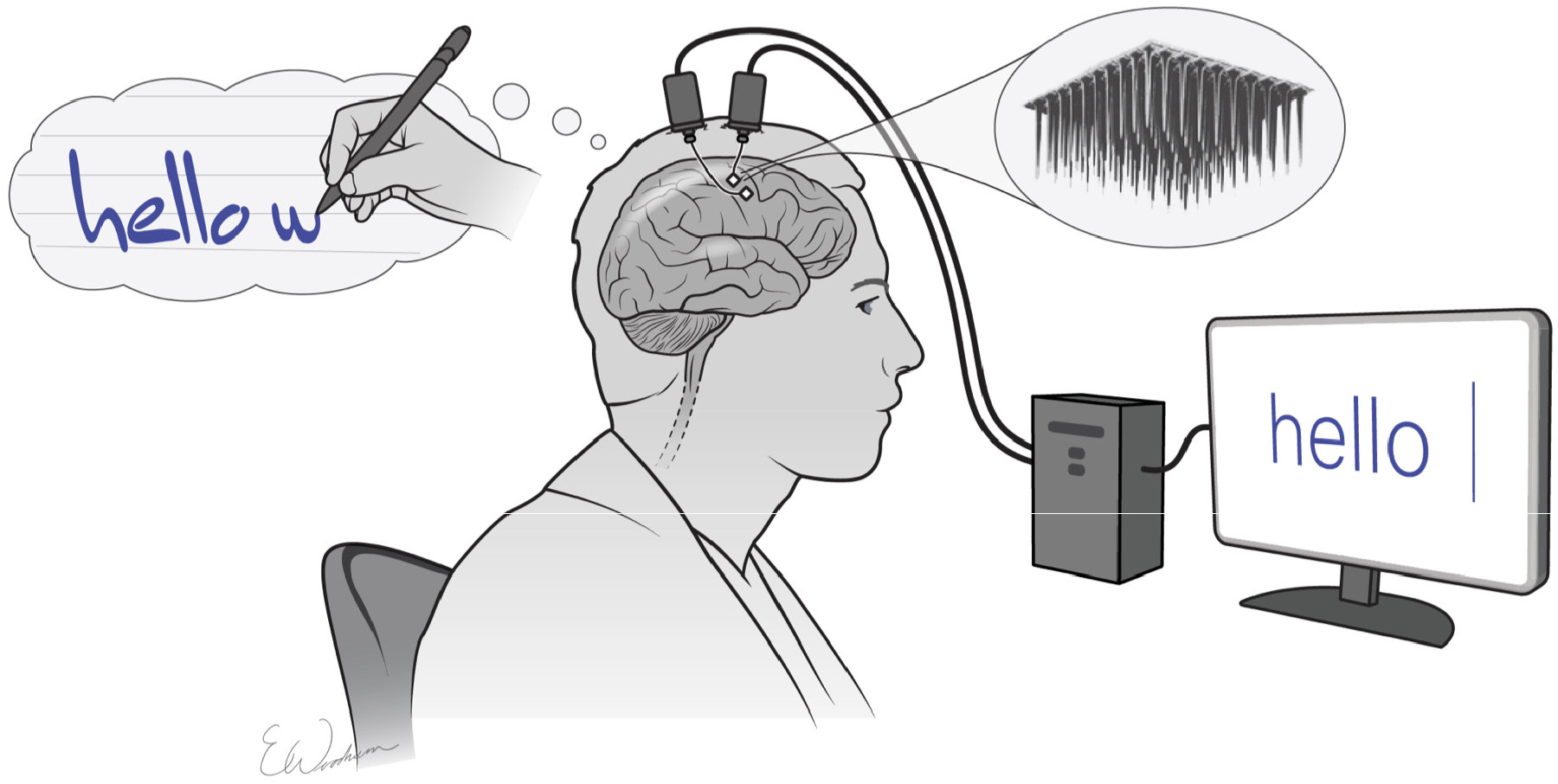
- Abstract. Systems and methods for decoding intended symbols from neural activity in accordance with embodiments of the invention are illustrated. One embodiment includes a symbol decoding system for brain-computer interfacing, including a neural signal recorder implanted into a brain of a user, and a symbol decoder, the symbol decoder including a processor, and a memory, where the memory includes a symbol decoding application capable of directing the processor to obtain neural signal data from the neural signal recorder, estimate a symbol from the neural signal data using a symbol model, and perform a command associated with the symbol.
- Willett FR, Avansino DT, Hochberg LR, Henderson JM**, Shenoy KV** (2021) High-performance brain-to-text communication via imagined handwriting. Nature.
- Full size bundle of parts (24 MB) pdf
- Reduced size bundle of parts (8 MB) pdf
- Main paper. pdf url
- Supplementary material. pdf url
- Peer review file. pdf url
- Videos
- Video 1: Copying sentences in real-time with the handwriting brain-computer interface. In this video, participant T5 copies sentences displayed on a computer monitor with the handwriting-brain computer interface. When the red square on the monitor turns green, this cues T5 to begin copying the sentence. url
- Video 2: Hand micromotion while using the handwriting brain-computer interface. Participant T5 is paralyzed from the neck down (C4 ASIA C spinal cord injury) and only generates small micromotions of the hand when attempting to handwrite. T5 retains no useful hand function. url
- Video 3: Freely answering questions in real-time with the handwriting brain-computer interface. In this video, participant T5 answers questions that appear on a computer monitor using the handwriting brain-computer interface. T5 was instructed to take as much time as he wanted to formulate an answer, and then to write it as quickly as possible. url
- Video 4: Side-by-side comparison between the handwriting brain-computer interface and the prior state of the art for intracortical brain-computer interfaces. In a prior study (Pandarinath et al., 2017) participant T5 achieved the highest typing speed ever reported with an intracortical brain-computer interface (39 correct characters per minute using a point-and-click typing system). Here, we show an example sentence typed by T5 using the point-and-click system (shown on the bottom) and the new handwriting brain-computer interface (shown on the top), which is more than twice as fast. url
12. Systems and methods for decoding intended speech from neuronal activity. Pub. No.: US 2019/0333505 A1. Pub. Date: Oct. 31, 2019. Sergey Stavisky, Krishna V. Shenoy, Jaimie M. Henderson. Assignee: The Board of Trustees of the Leland Stanford Junior University, Stanford, CA. PENDING. Licensed by Blackrock Neurotech and Neuralink starting in 2021. pdf url
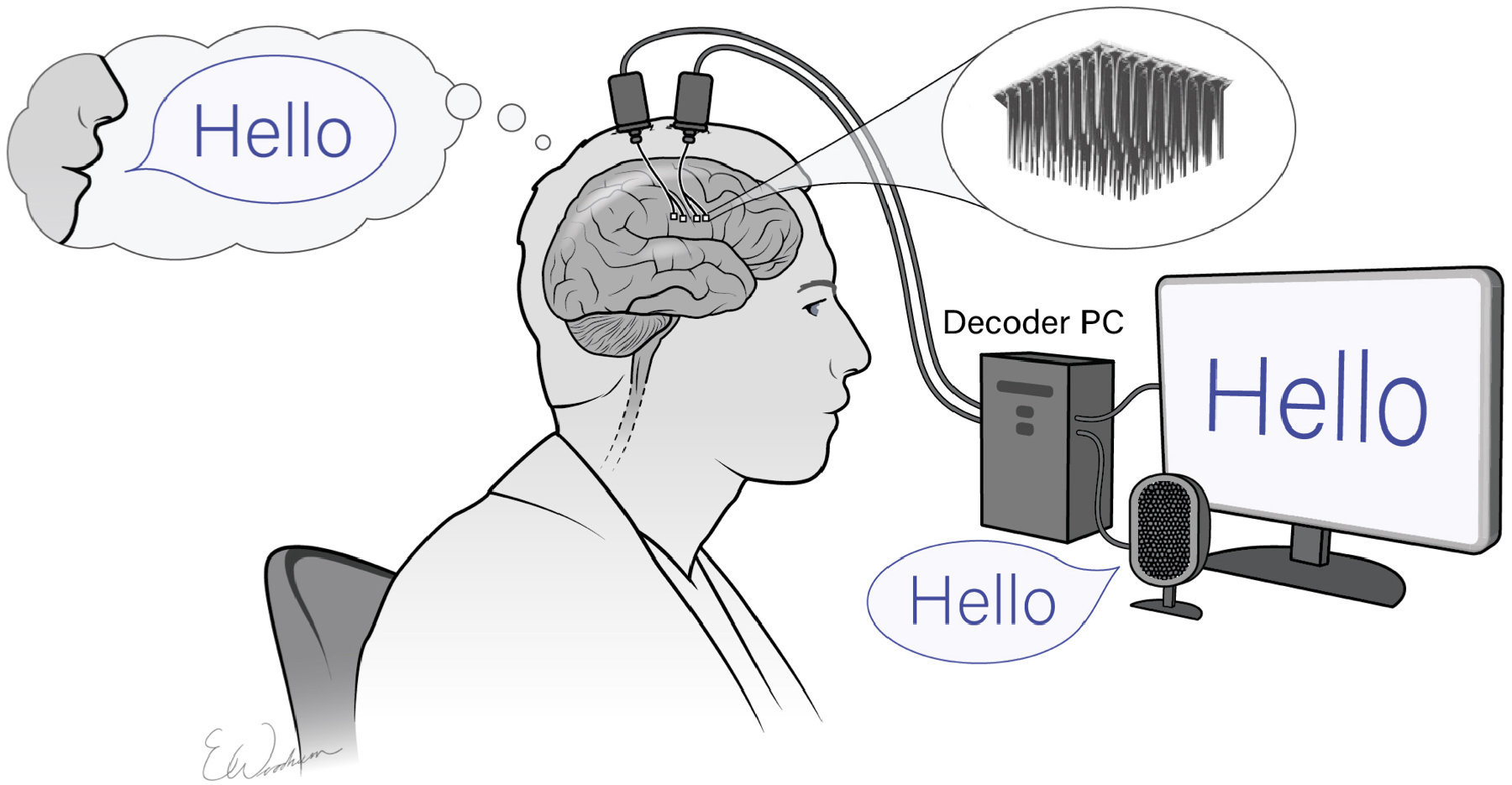
- Abstract. Systems and methods for decoding indented speech from neuronal activity in accordance with embodiments of the invention are illustrated. One embodiment includes a neuronal speech system for decoding intended speech from neuronal signals includes a neuronal signal recorder implanted into a user's brain, including a multielectrode array, controller circuitry, and a communication circuitry capable of transmitting data to a neuronal signal decoder, the neuronal signal decoder located externally from the user's body, including a processor, an input/output interface, and a memory, where the memory contains a neuronal speech application that directs the processor to obtain neuronal signal data from the neuronal signal recorder, where the neuronal signal data describes neuronal activity proximal to the implanted neuronal signal recorder, decode speech features from the neuronal signal data using a neuronal decoding model, construct a speech string from the decoded speech features; and output the constructed speech string via an output device.
- Stavisky SD, Willett FR, Wilson GH, Murphy BA, Rezaii PG, Avansino D, Memberg WD, Miller JP, Kirsch RF, Hochberg LR, Ajiboye AB, Druckmann S, Shenoy KV**, Henderson JM** (2019) Neural ensemble dynamics in dorsal motor cortex during speech in people with paralysis. eLife. 8:e46015. pdf url
- Stavisky SD, Willett FR, Avansino DT, Hochberg LR, Shenoy KV**, Henderson JM** (2020) Speech-related dorsal motor cortex activity does not interfere with iBCI cursor control. Journal of Neural Engineering. 17:016049 (13pp). pdf url
- Wilson GH*, Stavisky SD*, Willett FR, Avansino DT, Kelemen JN, Hochberg LR, Henderson JM**, Druckmann S,** Shenoy KV** (2020) Decoding spoken English phonemes from intracortical electrode arrays in dorsal precentral gyrus. Journal of Neural Engineering. 17:066007 pdf url
11. Systems and methods for virtual keyboards for high dimensional controllers. Patent No.: US 10,949,086 B2. Pub. Date: Mar. 16, 2021. Nir Even-Chen, Krishna V. Shenoy. Assignee: The Board of Trustees of the Leland Stanford Junior University, Stanford, CA. ISSUED.
- Pub. Date: Apr. 30,2020. Pub. No.: US 2020/0133486 A1 pdf url
- Date of Patent: Mar. 16, 2021. Patent No.: US 10,949,086 B2 pdf
- Abstract. Systems and methods for using virtual keyboards for high dimensional controllers in accordance with embodiments of the invention are illustrated. One embodiment includes a virtual keyboard system including a processor, and a memory, including a virtual keyboard application, where the virtual keyboard application directs the processor to display a plurality of 3D keys in a virtual environment, where each 3D key represents at least one symbol via a display device, display a cursor in the virtual environment, where the cursor is movable in at least three dimensions via the display device, obtain a user input data from an input device, move the cursor to a 3D key in the plurality of 3D keys based on the user input data, and record the at least one symbol represented by the 3D key.
- Stavisky SD, Nuyujukian P, Pandarinath C, Even-Chen N, Jarosiewicz B, Rezaii P, Hochberg LR, Henderson JM, Shenoy KV (2017) Accurate and simultaneous 5.1 degree-of-freedom control of a virtual cursor by a person with paralysis using an intracortical BCI. Neuroscience Meeting Planner. Washington, DC: Society for Neuroscience. Online. 642.07.
10. Multiplicative recurrent neural network for fast and robust intracortical brain machine interface decoders. Patent No.: US 10,223,634 B2. Date of patent: Mar. 5, 2019. David Sussillo, Jonathan C. Kao, Sergey Stavisky, Krishna V. Shenoy. Assignee: The Board of Trustees of the Leland Stanford Junior University, Stanford, CA. ISSUED. Licensed by Blackrock Neurotech starting in 2021. pdf url
- Abstract. A brain machine interface (BMI) to control a device is provided. The BMI has a neural decoder, which is a neural to kinematic mapping function with neural signals as input to the neural decoder and kinematics to control the device as output of the neural decoder. The neural decoder is based on a continuous-time multiplicative recurrent neural network, which has been trained as a neural to kinematic mapping function. An advantage of the invention is the robustness of the decoder to perturbations in the neural data; its performance degrades less — or not at all in some circumstances — in comparison to the current state decoders. These perturbations make the current use of BMI in a clinical setting extremely challenging. This invention helps to ameliorate this problem. The robustness of the neural decoder does not come at the cost of some performance, in fact an improvement in performance is observed.
- Sussillo D*, Stavisky SD*, Kao JC*, Ryu SI, Shenoy KV (2016) Making brain-machine interfaces robust to future neural variability. Nature Communications. 7:13749. doi: 10.1038/ncomms13749 pdf supp_mats video1 video2 video captions
9. Task-outcome error signals and their use in brain-machine interfaces. Patent No.: US 10,779,764 B2. Date of patent: Sep. 22, 2020. Nir Even-Chen, Krishna V. Shenoy, Jonathan C. Kao, Sergey Stavisky. Assignee: The Board of Trustees of the Leland Stanford Junior University, Stanford, CA. ISSUED. pdf url
- Abstract. A brain machine interface (BMI) for improving a performance of a subject is provided. The BMI has two decoders that act in real-time and in parallel to each other. The first decoder is for intention execution of a subject's intention. The second decoder is for error detection in a closed-loop error fashion with the first detector and to improve the performance of the first detector. Embodiments of this invention may enable an entirely new way to substantially increase the performance and robustness, user experience, and ultimately the clinical viability of BMI systems.
- Even-Chen N, Stavisky SD, Pandarinath C, Nuyujukian P, Blabe CH, Hochberg LR, Henderson* JM, Shenoy* KV (2018) Feasibility of automatic error detect-and-undo system in human intracortical brain-computer interfaces. IEEE Transactions in Biomedical Engineering. 65:1771-1784. pdf url
- Even-Chen N, Stavisky S, Kao J, Ryu SI, Shenoy KV (2017) Augmenting intracortical brain-machine interface with neurally driven error detectors. Journal of Neural Engineering. 14:066007 (16pp). pdf url
8. Brain machine interface utilizing a discrete action state decoder in parallel with a continuous decoder for a neural prosthetic device. Patent No.: US 9,373,088 B2. Date of patent: Jun. 21, 2016. Paul Nuyujukian, Jonathan C. Kao, Krishna V. Shenoy. Assignee: The Board of Trustees of the Leland Stanford Junior University, Stanford, CA. ISSUED. Licensed by Blackrock Neurotech and Neuralink starting in 2021. pdf url
- Abstract. A brain machine interface for control of prosthetic devices is provided. In its control, the interface utilizes parallel control of a continuous decoder and a discrete action state decoder. In the discrete decoding, we not only learn states affiliated with the task, but also states related to the velocity of the prosthetic device and the engagement of the user. Moreover, we not only learn the distributions of the neural signals in these states, but we also learn the interactions/transitions between the states, which is crucial to enabling a relatively higher level of performance of the prosthetic device. Embodiments according to this parallel control system enable us to reliably decode not just task-related states, but any “discrete action state,” in parallel with a neural prosthetic “continuous decoder,” to achieve new state-of-the-art levels of performance in brain-machine interfaces.
- Nuyujukian P, Kao JC, Ryu SI, Shenoy KV (2017) A non-human primate brain computer typing interface. Proceedings of the IEEE.105:66-72. video abstract pdf video 1 video 2 video 3
- Kao JC*, Nuyujukian P*, Ryu SI, Shenoy KV (2017) A high-performance neural prosthesis incorporating discrete state selection with hidden Markov models. IEEE Transactions on Biomedical Engineering. 64:935-945. pdf supp_mats
- Kemere C, Santhanam G, Yu BM, Afshar A, Ryu SI, Meng TH, Shenoy KV (2008) Detecting neural state transitions using hidden Markov models for motor cortical prostheses. Journal of Neurophysiology. 100:2441-2452. pdf
7. Brain machine interfaces incorporating neural population dynamics. Patent No.: US 9,095,455 B2. Date of patent: Aug. 4, 2015. Jonathan C. Kao, Paul Nuyujukian, Mark M. Churchland, John P. Cunningham, Krishna V. Shenoy. Assignees: The Board of Trustees of the Leland Stanford Junior University, Stanford, CA and Cambridge Enterprise Limited, Cambridge (GB). ISSUED. pdf url
- Abstract. A brain-machine interface is provided that incorporates a neural dynamical structure in the control of a prosthetic device to restore motor function and is able to significantly enhance the control performance compared to existing technologies. In one example, a neural dynamical state is inferred from neural observations, which are obtained from a neural implant. In another example, the neural dynamical state can be inferred from both the obtained neural observations and from the kinematics. A controller interfaced with the prosthetic device uses the inferred neural dynamical state as input to the controller to control kinematic variables of the prosthetic device.
- Kao JC, Ryu SI, Shenoy KV (2017) Leveraging neural dynamics to extend functional lifetime of brain-machine interfaces. Scientific Reports. 7: 7395:1-16. pdf url
- Kao JC, Nuyujukian P, Cunningham JP, Churchland MM, Ryu SI, Shenoy KV (2015) Single-trial dynamics of motor cortex and their applications to brain-machine interfaces. Nature Communications. 6:7759. pdf supp_mats
6. Brain machine interface. Patent No.: US 8,792,976 B2. Date of patent: Jul. 29, 2014. Vikash Gilja, Paul Nuyujukian, Cynthia A. Chestek, John P. Cunningham, Byron M. Yu, Stephen I. Ryu, Krishna V. Shenoy. Assignee: The Board of Trustees of the Leland Stanford Junior University, Stanford, CA. ISSUED. Licensed by Blackrock Neurotech and Neuralink starting in 2021. pdf url
- Abstract. Artificial control of a prosthetic device is provided. A brain machine interface contains a mapping of neural signals and corresponding intention estimating kinematics (e.g. positions and velocities) of a limb trajectory. The prosthetic device is controlled by the brain machine interface. During the control of the prosthetic device, a modified brain machine interface is developed by modifying the vectors of the velocities defined in the brain machine interface. The modified brain machine interface includes a new mapping of the neural signals and the intention estimating kinematics that can now be used to control the prosthetic device using recorded neural brain signals from a user of the prosthetic device. In one example, the intention estimating kinematics of the original and modified brain machine interface includes a Kalman filter modeling velocities as intentions and positions as feedback.
- Gilja V*, Pandarinath C*, Blabe CH, Nuyujukian P, Simeral JD, Sarma AA, Sorice BL, Perge JA, Jarosiewicz B, Hochberg LR, Shenoy KV**, Henderson JM** (2015) Clinical translation of a high performance neural prosthesis. Nature Medicine. 21:1142-1145. pdf url
- Gilja V*, Nuyujukian P*, Chestek CA, Cunningham JP, Yu BM, Fan JM, Churchland MM, Kaufman MT, Kao JC, Ryu SI, Shenoy KV (2012) A high-performance neural prosthesis enabled by control algorithm design. Nature Neuroscience. 15:1752-1757. pdf supp_mats movie1 movie2 movie3 movie4 movie5 movie6
5. Brain-machine interface utilizing interventions to emphasize aspects of neural variance and decode speed and angle. Pub. No.: US 2015/0245928 A1. Pub. Date: Sep. 3, 2015. Jonathan C. Kao, Chethan Pandarinath, Paul Nuyujukian, Krishna V. Shenoy. Related U.S. ApplicationData: Continuation-in-part of aplication No. 12/932,070, filed on Feb. 17, 2011, now Pat. No.: US 8,792,976; Provisional aplication No. 61/338,460, filed on Feb. 18, 2010, provisional aplication No. 61/837,014, filed on Jun. 19, 2013. ISSUED. pdf url
- Abstract. A brain machine interface (BMI) for restoring performance of poorly performing decoders is provided. The BMI has a decoder for decoding neural signals for controlling the brain machine interface. The decoder separates in part neural signals associated with a direction of movement and neural signals associated with a speed of movement of the brain machine interface. The decoder assigns relatively greater weight to the neural signals associated with a direction of movement.
4. Decoding of neural signals for movement control. Patent No.: US 7,058,445 B2. Date of patent: Jun. 6, 2001. Caleb T. Kemere, Gopal Santhanam, Byron M. Yu, Teresa H. Meng, Krishna V. Shenoy. Assignee: The Board of Trustees of the Leland Stanford Junior University, Stanford, CA. ISSUED. pdf url
- Abstract. A brain machine interface for decoding neural signals for control of a machine is provided. The brain machine interface estimates and then combines information from two classes of neural activity. A first estimator decodes movement plan information from neural signals representing plan activity. In one embodiment the first estimator includes an adaptive point-process filter or a maximum likelihood filter. A second estimator decodes peri-movement information from neural signals representing peri-movement activity. Each estimator is designed to estimate different aspects of movement such as movement goal variables or movement execution variables.
- Yu BM, Kemere C, Santhanam G, Afshar A, Ryu SI, Meng TH, Sahani M*, Shenoy KV* (2007) Mixture of trajectory models for neural decoding of goal-directed movements. Journal of Neurophysiology. 97:3763-3780. pdf
- Kemere C, Shenoy KV, Meng TH (2004) Model-based neural decoding of reaching movements: a maximum likelihood approach. IEEE Transactions on Biomedical Engineering. 51:925-932. pdf
3. Cognitive state machine for prosthetic systems. International Publication No.: WO 03/005934 A3. Date of patent: Jan. 23, 2003. Richard A. Andersen, Bijan Pesaran, Partha Mitra, Daniella Meeker, Krishna V. Shenoy, Shiyan Cao, Joel W. Burdick. Applicant: California Institute of California, Pasadena, CA. ISSUED. pdf url
- Abstract. A prosthetic system may use a decoder to predict an intended action, such as a reach, from processed signals generated from measured neural activity. The decoder may included a cognitive state machine, which transitions between cognitive states based on transition rules.
2. Cognitive state machine for prosthetic systems. Pub. No.: US 2003/0023319 A1. Richard A. Andersen, Bijan Pesaran, Partha Mitra, Daniella Meeker, Krishna V. Shenoy, Shiyan Cao, Joel W. Burdick. Provisional aplication No. 60/304,805, filed on Jul. 10, 2001. Provisional aplication No. 60/304,842, filed on Jul. 11, 2001. ISSUED. pdf url
- Abstract. A prosthetic system may use a decoder to predict an intended action, such as a reach, from processed signals generated from measured neural activity. The decoder may included a cognitive state machine, which transitions between cognitive states based on transition rules.
- Shenoy KV, Meeker D, Cao S, Kureshi SA, Pesaran B, Mitra P, Buneo C A, Batista AP, Burdick JW, Andersen RA (2003) Neural prosthetic control signals from plan activity. NeuroReport. 14:591-596. pdf
1. Processed neural signals and methods for generating and using them. Patent No.: US 6,609,017 B1. Date of patent: Aug. 19, 2003. Krishna V. Shenoy, Richard A. Andersen, Sohaib A. Kureshi. Asignee: California Institute of Technology, Pasadena, CA. Related U.S. Application Data. Provisional aplication No. 60/095,833, filed on Aug. 7, 1998, and provisional aplication No. 60/099,222, filed on Sep. 4, 1998. ISSUED. pdf url
- Abstract. The present invention provides a processed neural signal that encodes a reach plan, comprising the target location of the planned encoded relative to an eye-centered reference frame. The present invention also provides methods for generating and decoding the processed neural signal.
- Shenoy KV, Meeker D, Cao S, Kureshi SA, Pesaran B, Mitra P, Buneo C A, Batista AP, Burdick JW, Andersen RA (2003) Neural prosthetic control signals from plan activity. NeuroReport. 14:591-596. pdf